扫地机器人全方位选购指南—感应器
上章在吸尘口介绍部分,小编曾经介绍过用于判断垃圾数量的感应器,其实市面上的扫地机器人产品除此之外,还或多或少的搭载了其它类型的感应器。
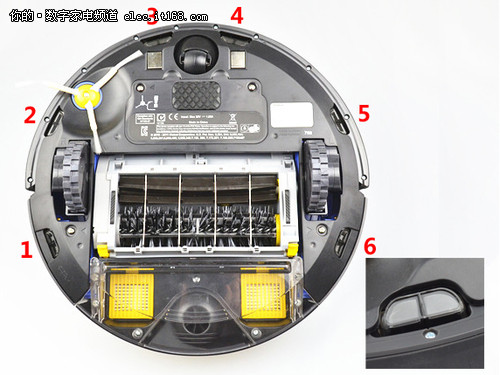
▲iRobot Roomba780的跌落感应器位置图
如几乎所有产品都具备的跌落感应器,一般就布置在扫地机器人底部边缘,其能够探测出超过一定高度的落差,这样当清扫工作遇到台阶等环境时,便能让扫地机器人及时知晓并转向,从而有效避免跌落造成损坏。
▲iRobot Roomba780防跌落测试
在如iRobot全系列、KV8和科沃斯大部分型号的扫地机器人上,您都会发现机体前部被一圈长短不一的深色带状透明物包裹,这就是扫地机器人的障碍感应器。

▲科沃斯地宝730的红外障碍感应器
障碍感应器的主要作用是感知扫地机器人前方的障碍物,实现提前减缓机体的行进速度,从而达到降低碰撞力度,保护机体和被撞障碍物不受损坏的目的。目前障碍感应器主要采用的是红外感应技术,其具有技术成熟、成本低廉、使用寿命长和工作可靠性高等优点。

▲科沃斯魔镜CR120的EVS防撞系统采用的是红外障碍感应器
但红外感应技术也并非没有弱点,当红外线照射到诸如鱼缸、玻璃门等透明或半透明的物体时,其将直接穿过而不产生任何回波,这样扫地机器人就无法感应到前方有障碍物,于是也就无法做出减速的工作了。

▲采用超声波障碍感应器的夏普Cocorobo RX-100V
也有少部分厂商的扫地机器人产品,如微星iCleaner M800、夏普Cocorobo RX系列和LG公司全系列产品都采用了应用超声波技术的障碍感应器,虽然其能有效避免红外感应技术的弱点,但因其技术门槛和生产成本都较高等原因,目前并未被大多数品牌所采用,故也就不做评论了。

▲iRobot Roomba780的控制信号感应器
在某些型号的扫地机器人机体顶部还设有一透明圆形凸起,其就是用于全方位接收遥控器、充电底座和虚拟墙发出的控制信号感应器。

▲iRobot Roomba780遥控演示图
具备控制信号感应器的产品,用户可方便通过遥控器准确控制其移动至指定区域工作(不然就得用手移动了),同时在一定范围内,充电底座上的红外信号发射器,也能引导其返回进行充电。
▲思酷F1c自动返回底座充电测试
而更高端一些的型号配置的虚拟墙,同样也是通过控制信号感应器起作用的。虚拟墙组件一般放置在门边等需要分割清扫区域的位置,通过发射出一道红外线“墙”,阻止扫地机器人通过,从而使分割的区域达到更佳的清扫效果。

▲iRobot Roomba780标配灯塔虚拟墙功能效果图
在单一的虚拟墙功能上,iRobot公司还独家开发了特色的灯塔虚拟墙,其不仅具备简单的阻止通过功能,在当扫地机器人完成分割区域的清扫工作并通知其后,灯塔虚拟墙会引导扫地机器人进入下一个分割区域进行清扫,而且在清扫完成后还能引导其返回充电底座充电,从而更有效的提高了清扫效率。
▲iRobot Roomba780虚拟墙&灯塔虚拟墙功能测试
除了上述的感应器外,科沃斯公司还在旗下的760、750和730型上,搭载了磁力感应器,这样使用附带的磁性界线条也能如虚拟墙一样达成分割清扫区域的目的。

