科沃斯地宝“叮叮”CEN630评测-内构篇
翻面后,便能看到“叮叮”的运行和清扫结构,下图既显示了各部件的分布情况。CEN630采用了扫地机器人里常用的“三轮车”结构,既前部中央万向轮、两侧后方驱动轮的方式。
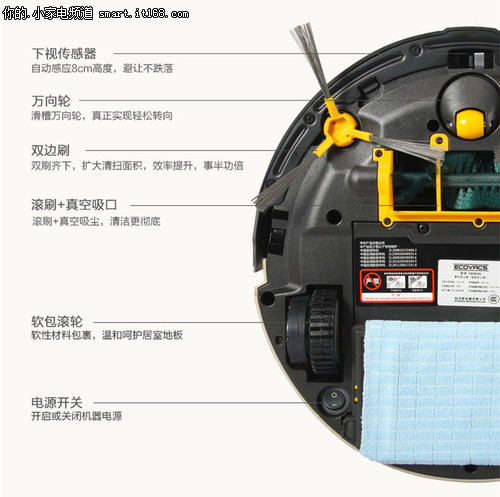
▲“叮叮”CEN630机体底面的部件示意图
万向轮前部缺口内安装着跌落传感器,其能够探测出超过8cm的高度,这样当“叮叮”遇到台阶时,便会及时转向避免跌落损坏,同样的传感器在碰撞板的左右两侧还各有一个。

▲万向轮前部缺口内安装着跌落传感器
万向轮可保证机体的转向灵活,但不可拆卸设计可能造成清洁上的不便。两个驱动轮则位于底面两侧中央稍靠后的位置,外覆齿状橡胶胎面,在不同材质的地面上,应该都能有效提供抓地力。

▲“叮叮”CEN630的驱动轮采用了弹簧避震、皮带传动的悬浮式结构
“叮叮”的驱动轮采用了弹簧避震、皮带传动的悬浮式结构,在10~30mm的离地高度机体都可自由活动,从而保证了CEN630具备一定的越障脱困能力。
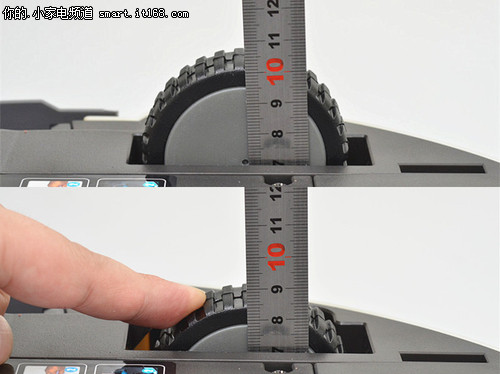
▲驱动轮在10~30mm的离地高度机体都可自由活动
▲“叮叮”CEN630的越障一般,但脱困能力还是合格的
而在清扫结构方面,“叮叮”CEN630采用了市售扫地机器人中常见的双边刷设计。边刷运转方式为向中央旋转,且刷毛长度合理,不会有打到万向轮和驱动轮的情况。

▲“叮叮”CEN630采用了市售扫地机器人中常见的双边刷设计
边刷安装采用了免工具设计,替换时只需按对应颜色直接插拔即可。相较需要拆卸螺丝的设计,这样更方便女性用户的使用。

▲边刷安装采用了免工具设计,替换时只需按对应颜色直接插拔即可
中央靠前的黄色方形区域则为“叮叮”的吸尘口,吸尘口内安装有双S型螺旋滚刷。每秒4000转配合密集刷毛,可将经过地面上的垃圾都吸入集尘盒内。

▲“叮叮”CEN630的吸尘口内安装有双S型螺旋滚刷
通过旋开右侧的黄色螺丝,可方便打开固定盖,抽取出滚刷进行清理。而且吸尘口滚刷轴承处设计有护板,这样就更好防止了灰尘进入、毛发缠绕等情况的发生。

▲旋开右侧的黄色螺丝,可方便打开固定盖、抽取出滚刷进行清理
滚刷两侧和后方还设计有橡胶刮板,进一步防止运行中垃圾从吸尘口逃逸,但仔细看刮板边缘并不平整,制造工艺还有待提高。

▲吸尘口滚刷轴承处设计有护板
另外在“叮叮”吸尘口的后方,还能按需加装的拖地组件。CEN630附送干/湿2块专用清洁布,可以通过卡扣方便固定到拖地组件上。
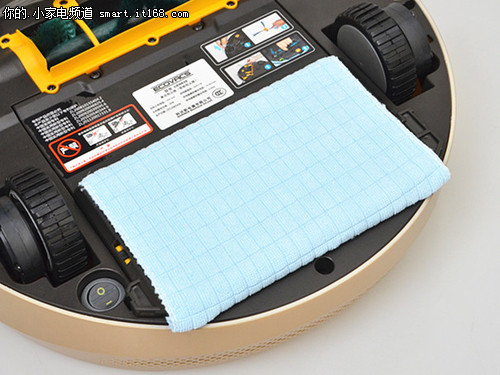
▲“叮叮”CEN630的吸尘口的后方,还能按需加装的拖地组件
虽然在扫地、吸尘过后,能再擦拭一遍地面,理论上可以做到全方位彻底的清洁。但17x10cm的有效面积,不能自动补水等问题,也使得其实用程度有待商榷。

▲17x10cm的有效面积,不能自动补水等问题,使得拖地组件的实用程度有待商榷
在吸尘口后方机体的方形盖板上,贴有含有使用注意和基本信息的标签,盖板下方则是CEN630的“大脑”-MCU芯片所在,而电池舱则是后方两侧的小盖板下。

▲“叮叮”CEN630吸尘口后方机体的方形盖板下,是MCU芯片电路板
拧开小盖板螺丝,可以看到2个3000mA容量的镍氢电池,其满电可支持连续工作约120分钟,而充电时间最长也只有300分钟,不过要是锂电池就更好了。

▲“叮叮”CEN630的3000mA容量的镍氢电池
“叮叮”CEN630左侧电池盖板旁,则设计有跷板式的主机电源开关,使用该开关可完全使机体断电,方便不使用时长时间的存放。
优点:
悬浮式结构橡胶驱动轮
方便拆装的双边刷设计
每秒4000转的双S型螺旋滚刷
缺点:
不可拆卸清理设计的万向轮

